

储罐除锈爬壁机器人:打破附壁行走“次元壁”有多难?
时间:2024-12-23 16:22:00作者:LeeZhou来源:德高洁清洁设备
储罐在生产运行过程中,罐体内外壁会受到外界环境中风水日晒、潮湿空气侵蚀,从而导致储罐外壁腐蚀现象的产生,随着时间的推移,储罐本体防腐层老化严重,破损脱落现象日益增加,加剧了罐体的大气腐蚀,降低了储罐的机械强度和安全性能,因此需要对储罐表面进行防腐除锈再喷涂施工。
当前在储罐防腐除锈施工中,行业内逐渐采用爬壁机器人代替人工高空作业,提高维护人员在危险环境下作业的安全性,降低作业风险,提高工作效率,并带来显著的经济效益和社会效益,储罐除锈防腐施工逐渐进入智能化、机械化时代,储罐除锈爬壁机器人逐渐被行业内关注,但这并不意味着打破“次元壁”就如此简单。

由于储罐属于大型静置设备,储罐表面工作环境复杂,爬壁机器人需要搭载除锈清洗装置,在储罐表面进行除锈作业,应对与储罐尺寸、形状、表面条件等问题,机器人需要兼具移动、行走、负载,越障等问题,因此,爬壁机器人能否安全稳定的完成高空作业,其吸附能力、行走能力是关键技术。
现有的爬壁机器人由于吸附与行走耦合问题,存在机器人在罐体表面向下滑动,稳定性低,不能承载足够的载荷能力等弊端。因此,爬壁机器人若想实现人工向自动化机械施工转变,必须打破爬壁机器人附壁行走的技术壁垒。
爬壁机器人的主要吸附方式包括:负压吸附、真空吸附、磁吸附、气体推力吸附、粘性吸附和仿生学吸附等,磁力吸附式适用于导磁性材料构成的壁面,在保证吸附距离的前提下,能产生远超其它吸附方式的吸附力,且受到壁面缺陷的影响较低,被广泛应用在储罐除锈防腐领域。
磁吸附式爬壁机器人依磁力来源可分为电磁式和永磁式两种:电磁式爬壁机器人吸力可调节,但是突然断电或电力不足将造成磁吸附力减小,进而可能引发机器人坠落事故;永磁式爬壁机器人的吸附力不受断电影响,但吸附力大小受吸附距离影响且距离不易主动调节。目前,面向大型储罐的除锈爬壁机器人,吸附方式主要采用永磁吸附技术。
可采用永磁吸附+履带式行走机构,将永磁铁镶嵌在履带上,然而履带行走机构本身的转向难题加上复杂罐壁条件,使得该种方式应用十分困难,需要比较大的驱动力,存在吸附机构与移动机构强耦合、吸附力难以调节等问题。
对于此,德高洁自主研发并投入使用了一款轮式磁吸附爬壁机器人,机器人附壁行走能力强,牢牢吸附在船体表面进行作业,并具备一定的曲面越障能力,可应对储罐表面焊缝,凹凸不平情况;采用四驱越野底盘轮式驱动,保障机器人运行的稳定性;可承受200kg负载,能够在280MPa的水压冲击力下进行防腐除锈施工。
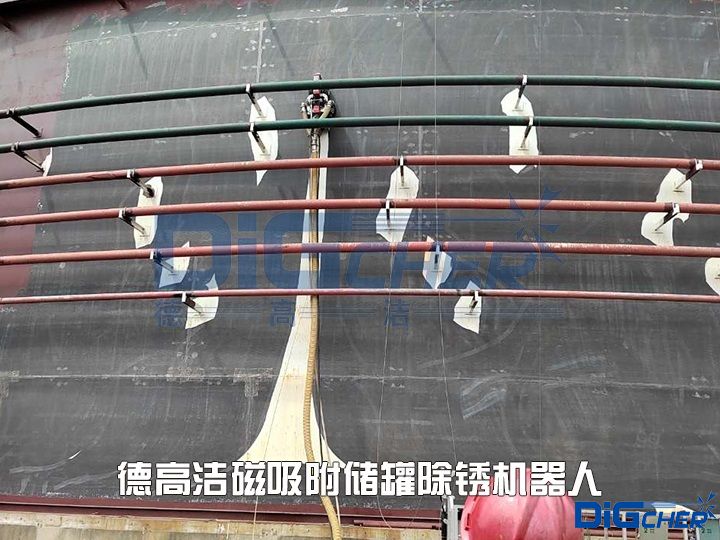
德高洁磁吸附储罐除锈机器人,搭载除锈清洗器作业,行走机构、附壁机构、射流装置、真空系统以及智能化控制系统设计于一体,利用超高压水射流除锈,能够高效率高质量的完成作业,除漆效率可达到70 m²/h,除锈等级可达Sa2.5,利用真空抽排回收装置,将除锈清洗后的废水及残渣进行回收,可在极端天气下对储罐外壁进行清洁工作,适用于大型储罐除锈维护工作。
德高洁自2015年便聚焦智能化、数控化、机器人化工业清洗技术的研究,期间自主研发并投入市场一系列机器人:高压水除锈爬壁机器人、海生物清理爬壁机器人、管道焊缝打磨机器人、自动喷涂爬壁机器人、喷砂爬壁机器人等,对大型金属表面进行自动化喷砂、除锈、清洗、喷涂等,在石化、船舶、电力等行业得到了广泛的应用。德高洁可为用户提供自动化机器人设备+专业施工团队,提供储罐外壁自动化除锈、清洗、喷涂施工服务,如您有需求欢迎电话联系,德高洁将竭诚为您服务。
当前在储罐防腐除锈施工中,行业内逐渐采用爬壁机器人代替人工高空作业,提高维护人员在危险环境下作业的安全性,降低作业风险,提高工作效率,并带来显著的经济效益和社会效益,储罐除锈防腐施工逐渐进入智能化、机械化时代,储罐除锈爬壁机器人逐渐被行业内关注,但这并不意味着打破“次元壁”就如此简单。
由于储罐属于大型静置设备,储罐表面工作环境复杂,爬壁机器人需要搭载除锈清洗装置,在储罐表面进行除锈作业,应对与储罐尺寸、形状、表面条件等问题,机器人需要兼具移动、行走、负载,越障等问题,因此,爬壁机器人能否安全稳定的完成高空作业,其吸附能力、行走能力是关键技术。
现有的爬壁机器人由于吸附与行走耦合问题,存在机器人在罐体表面向下滑动,稳定性低,不能承载足够的载荷能力等弊端。因此,爬壁机器人若想实现人工向自动化机械施工转变,必须打破爬壁机器人附壁行走的技术壁垒。
爬壁机器人的主要吸附方式包括:负压吸附、真空吸附、磁吸附、气体推力吸附、粘性吸附和仿生学吸附等,磁力吸附式适用于导磁性材料构成的壁面,在保证吸附距离的前提下,能产生远超其它吸附方式的吸附力,且受到壁面缺陷的影响较低,被广泛应用在储罐除锈防腐领域。
磁吸附式爬壁机器人依磁力来源可分为电磁式和永磁式两种:电磁式爬壁机器人吸力可调节,但是突然断电或电力不足将造成磁吸附力减小,进而可能引发机器人坠落事故;永磁式爬壁机器人的吸附力不受断电影响,但吸附力大小受吸附距离影响且距离不易主动调节。目前,面向大型储罐的除锈爬壁机器人,吸附方式主要采用永磁吸附技术。
可采用永磁吸附+履带式行走机构,将永磁铁镶嵌在履带上,然而履带行走机构本身的转向难题加上复杂罐壁条件,使得该种方式应用十分困难,需要比较大的驱动力,存在吸附机构与移动机构强耦合、吸附力难以调节等问题。
对于此,德高洁自主研发并投入使用了一款轮式磁吸附爬壁机器人,机器人附壁行走能力强,牢牢吸附在船体表面进行作业,并具备一定的曲面越障能力,可应对储罐表面焊缝,凹凸不平情况;采用四驱越野底盘轮式驱动,保障机器人运行的稳定性;可承受200kg负载,能够在280MPa的水压冲击力下进行防腐除锈施工。
德高洁磁吸附储罐除锈机器人,搭载除锈清洗器作业,行走机构、附壁机构、射流装置、真空系统以及智能化控制系统设计于一体,利用超高压水射流除锈,能够高效率高质量的完成作业,除漆效率可达到70 m²/h,除锈等级可达Sa2.5,利用真空抽排回收装置,将除锈清洗后的废水及残渣进行回收,可在极端天气下对储罐外壁进行清洁工作,适用于大型储罐除锈维护工作。
德高洁自2015年便聚焦智能化、数控化、机器人化工业清洗技术的研究,期间自主研发并投入市场一系列机器人:高压水除锈爬壁机器人、海生物清理爬壁机器人、管道焊缝打磨机器人、自动喷涂爬壁机器人、喷砂爬壁机器人等,对大型金属表面进行自动化喷砂、除锈、清洗、喷涂等,在石化、船舶、电力等行业得到了广泛的应用。德高洁可为用户提供自动化机器人设备+专业施工团队,提供储罐外壁自动化除锈、清洗、喷涂施工服务,如您有需求欢迎电话联系,德高洁将竭诚为您服务。
热门搜索:
